
















M505滑动自平衡偏置倒立摆

名称:其他仪器与工具
品牌:
型号:
简介:M505滑动自平衡偏置倒立摆的设计形象展示了闭环控制的必要性和有效性。与传统的车载倒立摆不同,该倒立摆是通过使得一个受重力作用影响的水平杆达到平衡来控制垂直摆杆。该系统的零极点全部位于右半平面,且具有运动和重力耦合非线性。通过调节配重块质量...



申请服务
- 产品介绍
M505滑动自平衡偏置倒立摆的设计形象展示了闭环控制的必要性和有效性。与传统的车载倒立摆不同,该倒立摆是通过使得一个受重力作用影响的水平杆达到平衡来控制垂直摆杆。该系统的零极点全部位于右半平面,且具有运动和重力耦合非线性。通过调节配重块质量,改变系统特征根,从而可以实现从相对简单到理论上不可能的控制问题。
 M505滑动自平衡偏置倒立摆详解:
M505滑动自平衡偏置倒立摆详解:
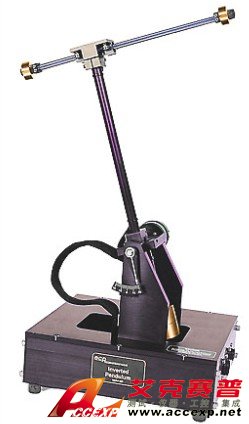
该滑动自平衡偏置倒立摆的设计形象展示了闭环控制的必要性和有效性。与传统的车载倒立摆不同,该倒立摆是通过使得一个受重力作用影响的水平杆达到平衡来控制垂直摆杆。该系统的零极点全部位于右半平面,且具有运动和重力耦合非线性。通过调节配重块质量,改变系统特征根,从而可以实现从相对简单到理论上不可能的控制问题。
该系统的机械结构包括可拆除/可调节的力矩臂,在水平杆和垂直杆上进行配重,以实现系统动态的快速调节。在连接处具有直线和旋转球形轴承,实现低摩擦和动态性能一致。
M505滑动自平衡偏置倒立摆详解:该滑动自平衡偏置倒立摆的设计形象展示了闭环控制的必要性和有效性。与传统的车载倒立摆不同,该倒立摆是通过使得一个受重力作用影响的水平杆达到平衡来控制垂直摆杆。该系统的零极点全部位于右半平面,且具有运动和重力耦合非线性。通过调节配重块质量,改变系统特征根,从而可以实现从相对简单到理论上不可能的控制问题。
该系统的机械结构包括可拆除/可调节的力矩臂,在水平杆和垂直杆上进行配重,以实现系统动态的快速调节。在连接处具有直线和旋转球形轴承,实现低摩擦和动态性能一致。













