整体核心动平衡机在增压器行业的应用

2012-12-24
当然,各个厂家的高速核心动平衡机在很多方面都有其各自特点,比如G.T.I. 公司 (日本联信的子公司)在半自动修正平衡机中采用了完全相同的磁性速度及相位识别系统来避免修正中磁性速度系统的误差; 美国霍夫曼公司在测量过程中采用闭环伺服速度控制系统等,在这里就不一一列举。
但就我所见到的,包括所有这些机器,都还有一些值得注意并需要完善的地方,比如:
▲ 由于驱动空气是冷的,而工况时废气是热的并且温度极高,所以转子在平衡机上时热膨胀及质心的变化与其在发动机上运转时会有不同; 并且油气混合物在气缸内爆炸的形式推动发动机运转,废气的产生和排放变化多端,与测量平衡时空气的推动力也可能有所不同。
▲ 由于要驱动转子到高速,如果不对压气机叶轮端进行处理,压气机叶轮势必作功,阻碍转速提高。所以,几乎所有的厂家都采取了用密封环盖住该端,加速旋转时使压气机叶轮端形成近似真空,这样一来,就可以将转速吹上去了,并由于是近似真空,一方面,还有部分空气,压气机叶轮仍然会作功发热;另一方面,又会产生“倒吸”现象,会将轴承腔内的油沿着密封环吸向压气机叶轮端。会对密封产生影响,还可能会发生油“冒烟”燃烧的现象。
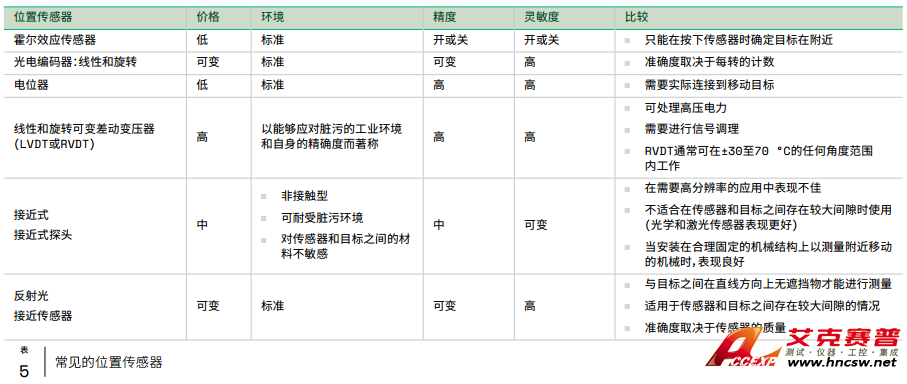
采取磁性速度传感器来检测转速,目前的汽油机小型增压器的工作转速都在200,000.00RPM以上,速度传感器中对高频率能够响应比较迅速的,只有磁性速度传感器了。但磁性传感器的不足在于相位角无法被准确获得,所以进行不平衡修正时就无法修正快速准确。原因是该传感器是使用对磁场强度的变化来记录转子的转速,所以对磁场强度强到何种程度,传感器开始响应就无从知道,所以对零件充磁后实际“0”度角的位置的总结就变得非常重要。通过一定的训练,操作员应能够基本掌握其具体位置。尽管如此,实际“0”度角的位置随每次充磁手法的略有不同和每次螺母材料的细微差异都会有不同,基本角度误差可以控制在20度以内。
对于刚性增压器(工作转速在临界转速以下,此时涡轮轴不会产生剧烈的挠性变形)的组合平衡,现在比较流行的方法是:除了压缩轮壳及涡轮壳及安装螺栓外,将所有旋转零件包括中间体及密封圈等装配在一起形成核心总成件,放在专用的空气驱动平衡机上进行双面平衡,这种平衡机要尽量模拟增压器的工况,在测量不平衡的同时,同时监测在油压轴承腔体内的油压及流量及油的温度,在高于形成油膜的速度进行测量(形成油膜的最低点大约在1700~2500RPM, 平衡转速通常会选择在3000~5000RPM)保证了油压浮动轴承的正常工作不受损坏并且不影响真实的不平衡结果。由于是空气驱动,带入的干扰就小得多。而让油压及流量和油的温度保持与工况时一致,也同样避免了因油况不同带入的干扰。平衡合格后,装上两个壳体出厂。//1000qsw.com/
但就我所见到的,包括所有这些机器,都还有一些值得注意并需要完善的地方,比如:
▲ 由于驱动空气是冷的,而工况时废气是热的并且温度极高,所以转子在平衡机上时热膨胀及质心的变化与其在发动机上运转时会有不同; 并且油气混合物在气缸内爆炸的形式推动发动机运转,废气的产生和排放变化多端,与测量平衡时空气的推动力也可能有所不同。
▲ 由于要驱动转子到高速,如果不对压气机叶轮端进行处理,压气机叶轮势必作功,阻碍转速提高。所以,几乎所有的厂家都采取了用密封环盖住该端,加速旋转时使压气机叶轮端形成近似真空,这样一来,就可以将转速吹上去了,并由于是近似真空,一方面,还有部分空气,压气机叶轮仍然会作功发热;另一方面,又会产生“倒吸”现象,会将轴承腔内的油沿着密封环吸向压气机叶轮端。会对密封产生影响,还可能会发生油“冒烟”燃烧的现象。
采取磁性速度传感器来检测转速,目前的汽油机小型增压器的工作转速都在200,000.00RPM以上,速度传感器中对高频率能够响应比较迅速的,只有磁性速度传感器了。但磁性传感器的不足在于相位角无法被准确获得,所以进行不平衡修正时就无法修正快速准确。原因是该传感器是使用对磁场强度的变化来记录转子的转速,所以对磁场强度强到何种程度,传感器开始响应就无从知道,所以对零件充磁后实际“0”度角的位置的总结就变得非常重要。通过一定的训练,操作员应能够基本掌握其具体位置。尽管如此,实际“0”度角的位置随每次充磁手法的略有不同和每次螺母材料的细微差异都会有不同,基本角度误差可以控制在20度以内。
对于刚性增压器(工作转速在临界转速以下,此时涡轮轴不会产生剧烈的挠性变形)的组合平衡,现在比较流行的方法是:除了压缩轮壳及涡轮壳及安装螺栓外,将所有旋转零件包括中间体及密封圈等装配在一起形成核心总成件,放在专用的空气驱动平衡机上进行双面平衡,这种平衡机要尽量模拟增压器的工况,在测量不平衡的同时,同时监测在油压轴承腔体内的油压及流量及油的温度,在高于形成油膜的速度进行测量(形成油膜的最低点大约在1700~2500RPM, 平衡转速通常会选择在3000~5000RPM)保证了油压浮动轴承的正常工作不受损坏并且不影响真实的不平衡结果。由于是空气驱动,带入的干扰就小得多。而让油压及流量和油的温度保持与工况时一致,也同样避免了因油况不同带入的干扰。平衡合格后,装上两个壳体出厂。//1000qsw.com/