Accexp无人机飞行仿真技术解决方案

2017-04-25
如今无人机工况条件日趋复杂恶劣,任务要求精度很高,同时需要保证无人机较高的可靠性。所以无人机系统复杂性与日俱增,开发难度极大,开发周期漫长,同时也阻碍了相应控制系统的迭代更新。 Accexp在无人机飞行领域涉及无人机仿真系统建模、无人机系统半实物仿真等相关领域的研究,并承接过大量关于无人机飞行仿真技术的项目,拥有丰富的无人机飞行仿真建模与调试经验。
Accexp在无人机飞行仿真领域能够提供多种服务,包括:
Accexp在无人机飞行仿真领域能够提供多种服务,包括:
• 提供全方位评价飞机系统品质的仿真平台;
• 提供全数字通用无人机飞行仿真系统模型;
• 提供导航系统、飞行控制系统、发动机控制系统等无人机各分系统的模型仿真;
• 在无人机总体方案论证阶段,通过替换或修改无人机的气动数据、总体数据,利用飞行仿真系统给出的仿真结果进行定性定量分析;
• 在无人机设计验证阶段,利用无人机飞行仿真系统提供的模型数据和设备接口,与无人机系统的真实部件进行连接,开展各种飞行仿真试验。
解决方案
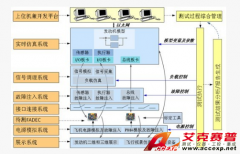
无人机仿真模型采用MATLAB/Simulink实现,其中无人机的飞行动力学模型、控制模型、导航模型等通过Simulink搭建实现,仿真模型的参数设置通过MATLAB开发实现。系统的组成如下图所示:
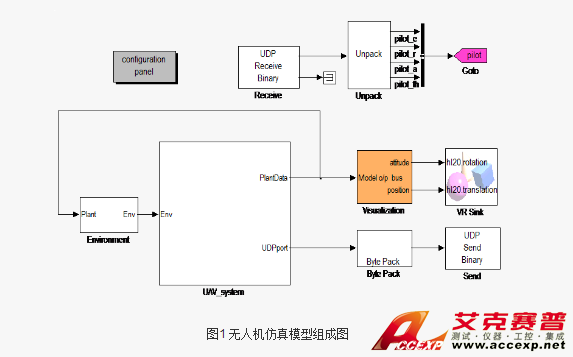
仿真所使用的无人机飞行仿真系统模型结构如1所示,图中仿真系统主要由环境模块、无人机系统模块、参数设置模块、操纵杆信号处理模块等部分组成。
主要关键技术如下:
• 环境模块
在环境模块中主要考虑了地形因素、风场因素、大气状态因素与重力加速度因素。其中地形环境可根据用户需要自行设置,风场部分通过simulink的自带风切变模块、紊流模块与离散突风模块构造了较为一般化的自然风。
• 操纵杆信号处理模块
无人机飞行仿真系统模型支持操纵杆控制,可接收操纵杆发送的油门指令、无人机姿态调节指令和升降指令,并利用接收到的指令数据进行模型解算,实现对无人机姿态和飞行高度的控制,方便用户模拟对无人机的驾驶。
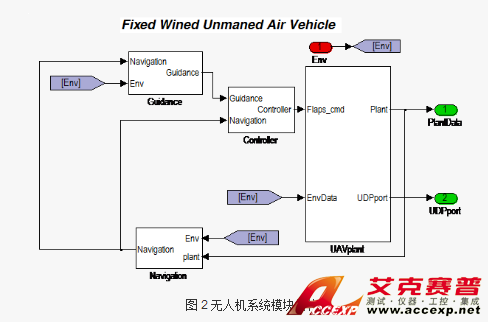
• 无人机系统模块
无人机系统模块如下图所示,该模块包含了无人机本体动力学模型、导航、发动机以及控制等所有功能模块。首先,制导模块向控制模块给出当前飞行阶段的轨迹姿态指令信号,这些信号在控制模块中通过针对无人机模型设计的控制律解算出完成飞行任务各个舵面所需的偏转量与发动机推力所需的调整量,并将这些操控数据传递给无人机动力学模型。无人机动力学模型根据当前的运动状态与操纵数据,计算作用在无人机上的所有外力、力矩,这些计算还依赖于模型初始化时定义的无人机各项气动导数数据,这些数据可在模块初属性中更改。得到了合外力与力矩后,根据六自由度动力学模块就可解算出无人机新的运动状态数据,这些数据会继续迭代到气动力与环境参数计算模块中继续解算无人机模型后续的运动状态,如此循环迭代求解一段时间之内无人机的各项飞行参数。
参数设置界面
参数设置界面
无人机仿真系统的运行需要详细的无人机数据的支持,这些数据中有一部分与无人机本体特性有关,不需要经常改动(如气动导数),而有一部分参数可能经常随飞行阶段或飞机状态的改变发生变化(如重量、惯矩等)。仿真系统在设计过程中将不需经常改动的数据定义在模型初始化的与处理程序中供模型调用,将可能经常变动的参数通过一个单独设计的参数设置界面进行定义。每次运行模型之前,用户可在该界面中对无人机的各项参数进行快速修改。
在参数配置界面中,用户可针对仿真与环境、几何参数、初始运动状态、执行机构特性和航迹参数设置五部分参数进行快速设置。界面中默认填充无人机原始的各项数据,用户可点击“清空”将该部分已填充项清空,点击“默认”可将原始默认值重新填充到各项目中。
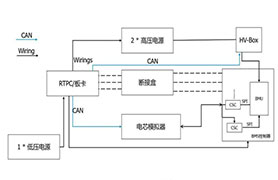
• 多种试验构型
在闭环系统中,导航系统、飞行控制系统、发动机控制系统等各分系统既可以是全数字的仿真模式,用于前期算法研究和确认;也可以任意替换实物产品,构成实时仿真模式,用于实物产品的试验验证。
主要优势
Accexp可独立完成无人机仿真模型的总体设计、研发、调试和项目交付等工作。并拥有独特的优势:
• 专业的无人机仿真建模技术;
• 专业的无人机仿真系统设计实施能力;
• 丰富的工程实践经验与半实物仿真经验;
• 齐全的专业队伍,分工协作(包括导航系统建模团队、飞行控制系统团队、发动机控制系统团队、半实物仿真系统团队等);
• 完善的管理体系支撑。
客户收益
采用Accexp的无人机飞行仿真技术,客户可以获得以下收益:
• 快速完成无人机系统方案的可行性论证,大大提升其灵活性与经济性;
• 可验证飞行任务的可行性;
• 快速验证无人机系统设计结果;
• 提高飞机系统试验、调试和训练过程中的安全性;
• 缩短无人机飞行仿真系统开发周期,降低研制费用;
• 为研发任务提供巨大便利,进一步提升了系统更新迭代速度,可适应市场需求环境的快速变化。




最新资讯